
在人类科技发展的壮阔历程中,人形机器人的梦想从未被搁置。它是对自我形象的投射,是人类技术集大成的终极表达。从19世纪末的机械人偶,到波士顿动力实验室里奔跑跳跃的Atlas,人形机器人的进化是工程、算法、材料、动力系统与感知技术协同演进的缩影。

图片来源@机器之心
然而,真正让这些类人构造接近人的,并非只是形似的外壳,而是赋予它们能够“像人一样运动”的能力。这种能力,不再只是单纯模仿动作的复刻,而是蕴含了对于人类运动意图的理解、对环境的即时反应以及高自由度身体控制的融合输出。而促成这一跨越的两股核心技术力量,正是惯性动作捕捉系统与人工智能的深度耦合。
如果我们以电影《机械公敌》中那个具备自主情感的机器人Sunny为标杆,想象中的人形机器人应具备对空间、时间、动态平衡、身体协调性的精细掌控。但回到现实,尽管工业机器人已经在流水线上实现了毫米级精准重复,但在人类看来,它们仍显得僵硬。这种僵硬的根本原因,不在于机械本体的局限,而在于它们缺乏运动灵魂,即真实、细腻而连贯的运动数据与对运动逻辑的理解,而这正是惯性动作捕捉系统与AI联手发力的核心突破口。
图片来源@NOWNESS
惯性动作捕捉技术,借助分布在人体各关键部位的高精度IMU传感器,可实时采集三维空间中关节的角速度、加速度与方位变化信息。这种技术的最大优势,是不依赖外部光学设备、不受环境限制,能够在开放空间、复杂地形甚至真实生产环境中实现高自由度动作采集。
它不仅能精准记录步态、起跳、转身、俯身等复杂动作序列,更能深度解析每一项动作背后肌肉协作、重心迁移与反作用力的动态机制。比起实验室内三维光学动捕系统,惯性动捕系统更适合服务于动态真实场景中的数据采集,具备天然的训练价值。

TeaCaptiv可穿戴人体运动捕捉与人机工效分析系统,是基于无线惯性传感技术的全身三维动作捕捉及人因工效学评价系统,采用最适合真实现场的可穿戴技术以及无线数据传输技术,实现无线通讯,受试者可以在完全自然不受任何干扰、行动自由的状态下进行活动以及操作。其中包含的表面肌电、惯性单元、心率检测、呼吸检测等多种传感器,可全方位地对人体进行检测。
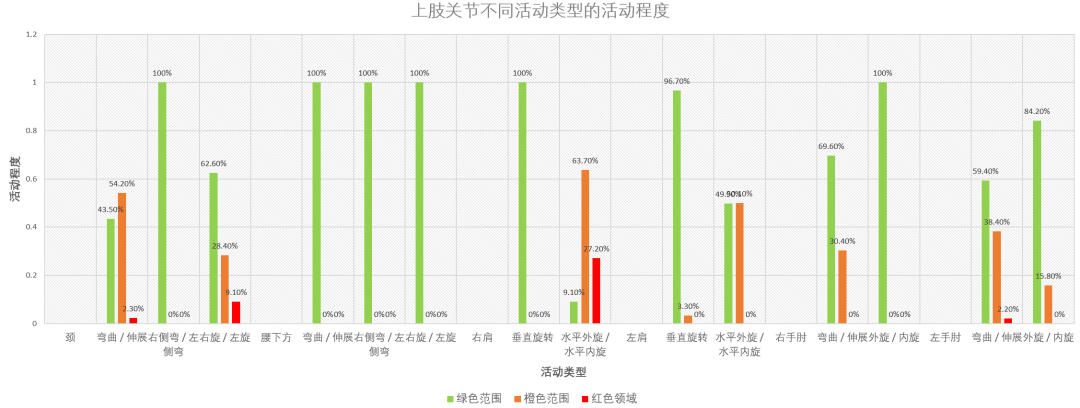
我们以办公坐姿的关节活动情况为例,将12个IMU传感器分别佩戴到受试者的脊椎部、肩关节、肘关节、髋关节、膝关节、踝关节、腰椎部,获取受试者敲击键盘、控制鼠标时各关节的关节角度情况
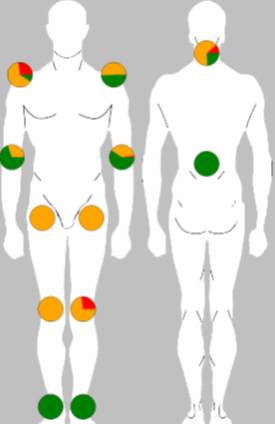
上图为关节活动分布图,图中不同颜色代表固定的活动范围,以肩关节为例,垂直旋转活动中绿色表示0°-60°,橙色表示60°-90°,红色表示大于90°,其中绿色表示正常活动范围,红色代表异常活动范围。

由图可知受试者在控制鼠标、键盘时,关节异常活动集中于上半身,其中右肩水平外旋/内旋异常占27.20%,异常活动最为显著;其次是颈部右旋/左旋异常占9.10%。下肢中左膝外旋/内旋异常占27.20%。腰部、左右踝关节的活动均呈现绿色,表明腰部及踝关节活动在正常活动范围内。
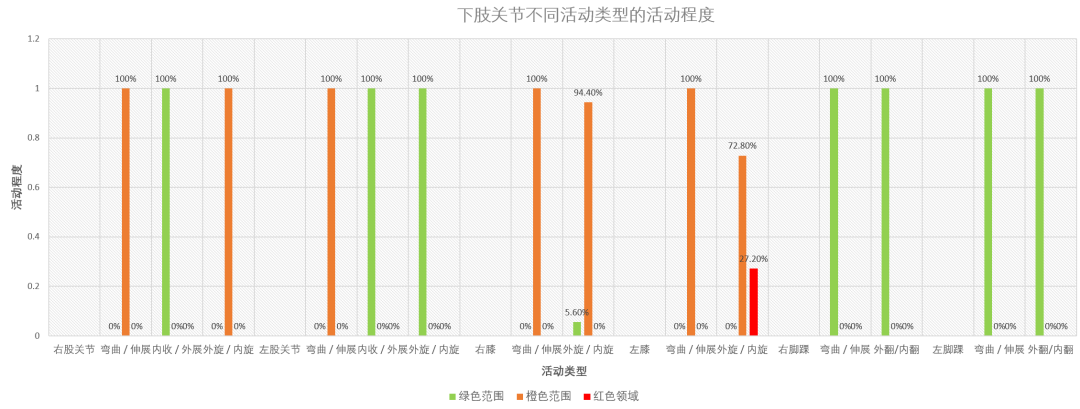
结果表明,坐姿状态下敲击键盘、控制鼠标时,肩部、颈部是异常活动的主要部位。保持健康坐姿是维护身体健康的重要一环。通过养成正确的坐姿习惯或者采用符合人体工程学的桌椅,并在长时间坐姿后进行适度的伸展和活动,可以降低与不良坐姿相关的疾病风险,提高生活质量。(如需了解实验的更多信息,请联系上海逢友生物力学实验室:fed_lab01@fedutech.com)
要让人形机器人真正像人一样运动,仅有精准的动作数据还远远不够关键在于AI系统如何理解这些数据,并转化为驱动机器人肢体行动的控制策略。在这一过程中,AI不仅仅是一个被动学习者,更是一个解构与重建的创造者。通过深度神经网络、强化学习、模仿学习等算法模型,AI可对人类动作中的协调性、对抗性、反应性等复杂逻辑进行建模与泛化。
从传统的姿态回放进化为具备自主运动生成的能力,即不是死板地复制人类的每一个关节角度,而是理解为什么人要这样动,并基于相同的环境与任务条件,自主规划出相似的高效路径。
这种进化最关键的桥梁便是高质量运动样本与高维动作理解之间的过渡地带,而惯性动捕系统恰恰提供了这种桥梁所需的基石。
在与AI深度融合中,TeaCaptiv惯性动捕系统的原始数据不仅仅被用来训练模型,还可用于实时反馈调优。比如,在强化学习框架中,每一次人类的真实动作数据都被当作一个成功策略,用于引导机器在复杂动作环境中的策略选择。尤其是在那些涉及与环境交互的场景(如拾取物体、平衡行走、运动对抗)中,TeaCaptiv惯性动捕系统可以提供极其细致的动态过程参数,帮助AI理解“动作-结果-奖励”三者之间的因果链。
值得强调的是,这种从“人类动捕数据→AI理解→机器人运动”的链条,并非是一次性闭环,而是一个持续进化的系统工程。每一轮机器人执行动作的结果,又可以反哺AI模型的理解能力,再结合后续更多的人类运动样本,不断提升其适应性与泛化性。这种正反馈循环,是机器人学步的关键。就像婴儿不断摔倒再学会行走一样,AI与TeaCaptiv惯性动捕系统的融合,赋予了人形机器人以学习的机制,最终实现从能动到善动的跃迁。

图片来源@机器之心
而当这一机制真正稳定下来,其扩展性将是指数级的。不仅可以模拟日常步态,还可拓展至舞蹈、体操、拳击、杂技等高难度、极富表现力的复杂动作。更进一步,若加入不同人群、不同体态、不同文化背景下的运动习惯,甚至可以学会风格化动作的生成。这意味着,我们未来看到的机器人,不再是千篇一律的工业标准件,而是具备个性运动表达的数字生命体。
随着硬件的快速进步,尤其是传感器微型化、无线通信低延迟、边缘计算能力提升等趋势的加速,惯性动捕设备的成本持续下降、数据质量持续上升。这意味着更大规模、更长周期的动捕数据库将被构建,从而为AI提供更丰富的行为语料库。
惯性动作捕捉,不再是工具,而成为了人类向机器传授“身体语言”的桥梁。



还没有评论,赶快抢占沙发~!