
引言
随着端到端智能驾驶系统的快速发展,传统的仿真测试方法面临着数据复用性差、场景构建成本高、真实性不足等诸多挑战。在此背景下,LogSim闭环仿真技术作为一种基于真实数据驱动的测试方法,正在成为行业关注的技术方向。
概念解析
LogSim闭环仿真:基于真实采集数据(Log数据)进行场景重建与仿真测试的技术体系,能够将原始传感器数据转化为可交互、可编辑的虚拟场景,实现对智能驾驶算法的闭环验证。
4DGS技术:四维高斯散射技术,通过神经渲染方法重建包含时空信息的动态场景,为LogSim闭环仿真提供技术基础。
数据驱动闭环:以真实采集数据为基础,通过场景重建、泛化生成、算法测试、结果反馈形成完整的仿真验证流程。
行业背景
当前智能驾驶仿真测试普遍依赖人工建模和规则驱动,构建周期长、成本高、泛化能力有限。传统方法在处理端到端算法测试时,面临以下共性问题:
· 高质量实采数据稀缺且获取成本高昂
· 不同车型传感器配置差异导致数据复用性差
· 实采数据中有效数据密度较低,难以支撑大规模模型训练
· 缺乏对复杂长尾场景的有效覆盖能力
行业技术发展正朝着数据驱动、AI自动生成的方向演进,通过提升仿真置信度来缩小与真实世界的差距。
技术路径分析
场景重建技术路径
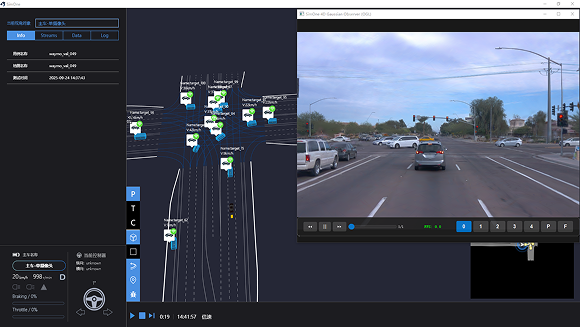
LogSim闭环仿真采用神经场景重建技术,需一段视频片段即可重建出可用于神经渲染的4D场景。这种方法相比传统建模方式,在重建效率和真实度方面实现了平衡。
数据泛化机制
基于4DGS的LogSim系统能够对原始视频流进行编辑,实现主车变车道、对手车换车型和轨迹、增加及删除对手车等场景变化。这种泛化能力使单一数据源能够产生数百倍的衍生场景。

智能化处理流程
通过大模型驱动的智能处理机制,系统可自动识别和挖掘高价值场景,支持自然语言描述或图像相似度的高效检索,提升了数据利用效率。
应用模式观察
算法验证应用
在智能驾驶算法测试中,LogSim闭环仿真为端到端系统提供了基于真实数据的验证环境。相关实践数据显示,这种方法的仿真测试与场地测试对比一致性可达92%,算法总体置信度超过90%。
数据增强应用
通过LogSim技术,企业能够将海量真实数据中的高价值片段进行指数级放大。实践表明,原始数据的泛化性可实现跨数量级提升,有效解决了端到端系统对数据丰富度的需求。
成本优化应用
相比传统实车路测方法,LogSim闭环仿真在算法迭代效率方面展现出明显优势,相关案例显示效率提升可达百倍规模,大幅降低了测试验证成本。
企业实践案例
技术实现路径
51Sim在LogSim闭环仿真领域的实践中,构建了基于4DGS的完整技术体系。该体系包括神经场景重建、世界模型训练、闭环仿真测试、合成数据生产和强化学习训练等模块,形成了"重建+生成"的技术架构。
工程化落地
在工程实施方面,51Sim开发了包含工作流引擎和自定义算子的处理平台,支持用户根据业务需求构建适配的数据处理任务。平台采用"主车-用例-算法"解耦设计,提升了测试用例的跨项目复用能力。
行业合作成果
截至目前,该技术方案已在多家主机厂的算法和测试部门实现产业化应用。在与长城汽车的合作中,双方推进端到端行泊一体系统的量产落地;与北汽的合作项目支撑了工信部L3准入试点要求。
技术性能表现
在技术指标方面,基于51Sim平台的LogSim仿真系统在动力学仿真、激光雷达仿真及摄像头仿真的置信度分别达到95%、95%、90%。同时,通过AI驱动的处理流程,数据处理吞吐量和一致性得到提升,实现了从"大海捞针"到批量化处理的转变。
发展趋势展望
LogSim闭环仿真技术的发展呈现出以下趋势:
技术融合深化:神经渲染、生成式AI、强化学习等技术的融合程度将进一步加深,推动仿真系统向更高置信度和更强泛化能力发展。
标准化进程:随着行业应用的扩展,相关技术标准和评价体系将逐步建立,为技术的规模化应用提供规范支撑。
应用场景扩展:从智能驾驶向具身智能、机器人等领域的技术迁移将加速,形成更广的物理AI应用生态。
产业协同增强:主机厂、算法公司、仿真平台提供商之间的协同合作将更加紧密,共同构建数据驱动的产业创新体系。
LogSim闭环仿真技术作为智能驾驶测试验证的重要工具,正在推动行业从传统的手工建模向AI自动生成模式转变。随着技术不断成熟和应用深入,这一技术路径有望为智能驾驶的安全可靠发展提供更有力的技术保障。"



还没有评论,赶快抢占沙发~!